- 국내 최초 300톤급 원격자율운항 예인선 실제 해상 운항
 |
| 삼성중공업 선박해양연구센터(대전) 내 원격관제센터에서 자율운항 중인 선박 'SAMSUNG T-8'에 장착된 고성능 카메라를 통해 조선소 주변 및 장애물을 확인하는 모습. /사진제공=삼성중공업 |
반경 1km 내 장애물 스스로 피하며 목적지까지 안전 운항
SAS '22년 상용화 목표···원격자율운항 분야 '퍼스트 무버'
[시사코리아저널=정종민 선임기자] 삼성중공업이 조선해운업계의 미래 기술인 원격자율운항 분야에서 가장 앞선 기술력을 선보이며 주목을 받고 있다.
삼성중공업은 거제조선소 인근 해상에서 길이 38m, 무게 300t급의 실제 선박을 원격·자율 운항하는 데 성공했다고 19일 밝혔다.
이번 시연은 거제조선소와 이 곳으로부터 250km 떨어진 대전 선박해양연구센터에 설치한 원격관제센터에서 동시에 진행됐다.
삼성중공업이 조선업계에서는 최초로 독자기술로 개발한 원격자율운항 시스템인 SAS(Samsung Autonomous Ship)를 실제 운항 중인 예인 선박 'SAMSUNG T-8'호에 탑재해 실증에 성공한 것이다.
SAS는 선박에 장착된 레이더(RADAR), GPS, AIS(Automatic Identification System) 등 항해통신장비의 신호를 실시간 분석해 주변 선박과 장애물을 인지한다.
또 선박 운항 특성을 고려한 충돌 위험도를 평가해 최적 회피경로를 찾아내며, 추진·조향장치 자동 제어로 선박 스스로 목적지까지 안전하게 항해할 수 있다.
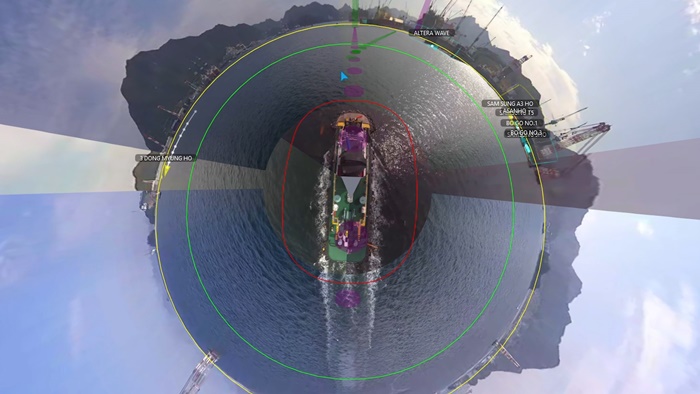 |
| 360도 어라운드뷰 모습. /사진제공=삼성중공업 |
특히, 세계 최초로 실선 적용된 선박용 360도 어라운드뷰(Around View)와 LTE/5G 이동통신 기술 등을 통해 멀리 떨어진 육상관제센터에서 마치 하늘에서 선박을 직접 내려다 보는 것과 같은 영상을 보며 원격으로 선박 제어가 가능하다.
실제 시험운항에서 SAMSUNG T-8호는 선원의 개입 없이 약 10km 떨어진 목적지를 돌아 안전하게 복귀했다.
운항 중 반경 1km내에 나타난 다른 선박이나 장애물을 스스로 피하는 충돌 회피 기술을 선보였다.
대전에 위치한 육상관제센터에서는 대형 스크린을 통해 해당 선박의 운항 상태를 증강현실(AR) 기술이 결합된 영상으로 실시간 모니터링하고, 선박을 직접 원격으로 제어하는 기술을 시연하기도 했다.
 |
| 원격자율운항 선박이 장애물 충돌을 회피하는 모습. /사진제공=삼성중공업 |
심용래 삼성중공업 조선해양연구소장은 "SAS는 선박이 자율적으로 최적화된 항로를 탐색해 운항함으로써 선원 부담을 경감시켜주는 안전운항 솔루션"이라며 "향후 인공지능(AI) 기술 및 초고속 통신기술과 결합해 더욱 발전된 운항보조 시스템으로 2022년 상용화할 계획"이라고 밝혔다.
이번 시연에 참관한 신명섭 DNV GL(노르웨이 선급) 영업본부장은 "충돌회피(Collision Avoidance), 자율운항(Auto Pilot), 원격제어(Remote Control) 기술을 결합한 성공적 시연"이라며 "삼성중공업이 이번 실증을 통해 원격자율운항 기술 리더십을 증명했다"고 평가했다.
한편, 삼성중공업은 지난해 업계 최초로 LNG운반선 형상의 모형선 '이지고(EasyGo)'를 통해 원격자율운항 테스트에 이어 실제 선박 시연까지 성공하며 원격자율운항 분야에서 '퍼스트 무버'로 도약 중이다.
정종민 기자 korea21ci@hanmail.net